Newton Euler Equations
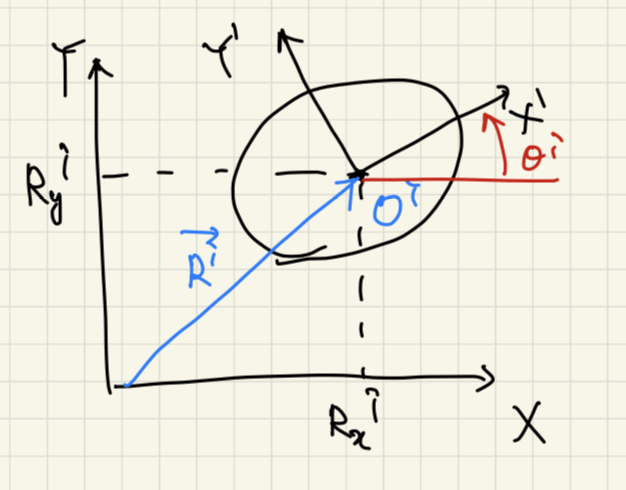
Reference point(O^i) 가 강체 i 의 질량중심에 위치해 있다고 생각하자.
M은 net Moment, J는 강체의 관성모멘트, F는 net force 이다. 따라서 2차원 공간에서 작용할 수 있는 3가지 자유도에 대한 힘과 모멘트는, 질량 중심에 작용하는 3가지 Term 으로 정리된다.
D’Alembert’s Principle
여기서 delta r 벡터는 Virtual displacement 라 한다.
Virtual Displacement
- 이 항은 시스템의 무한히 작은 변화를 가정했을 때 변위를 의미한다.
- 즉, 시간이 constant 일 때, 계의 변위를 측정한 것이다.
- 우리는 이것을 가상 변위라 부르는데, 실제로 시간이 상수일 때, 변위는 없기 때문이다.
식을 정리하면, 다음과 같이 정리된다.
D’Alembert’s Equation
여기서 q_j 는 다음과 같은 것들이 될 수 있다.
\\overset{\rightarrow}{q};=; \\begin{bmatrix} \[R_x^1& R_y^1 & \theta^1\] & \[R_x^2& R_y^2 & \theta^2\] & \[R_x^3 & R_y^3 & \theta^3\] \\end{bmatrix}^T \\ ;\\ ;=; \\begin{bmatrix} q_1& q_2& q_3& q_4& q_5& q_6& q_7& q_8& q_9 \\end{bmatrix}^T