기구학적인 joint 들은 각자가 가지는 특징 때문에, 기구학적으로 제약을 갖는다. 이 제약은 결국 시스템의 자유도를 구속하게 된다.
Ground
2차원 공간에서 기본적으로 가지는 자유도는 3이다. 이때, 특정 포인트를 내가 지면으로 잡는다면,
이렇게 3개의 제약이 걸리게 된다.
Revolute joint
특정 포인트에 Revolute joint가 달리게 될 경우, 회전만 가능하고, 두 body 사이에 연결된 revolute joint는 하나만을 가리켜야 한다.
Global coordinate 에서 표현한다고 했을 때, 따라서 body 1에서 가리키는 revolute joint의 벡터와 body 2에서 가리키는 revolute joint의 벡터는 같아야 한다.
따라서 2개의 제약이 걸리게 된다.
Prismatic joint
Prismatic joint는 한방향의 병진운동만 가능하게 하는 joint이다. 따라서 2개의 제약식이 만들어질 것임을 예상할 수 있다.
두 body 사이에 prismatic joint가 연결되어 있다면, global coordinate에서 봤을 때 정의된 두 body coordinate 의 초기 상대각도는 constant 로 유지된다.
또한 prismatic 의 경우, 두 바디 사이의 각이 항상 수직이다. 따라서 움직이는 방향 벡터와 수직으로 연결된 body의 벡터를 내적하면 항상 0이다. 따라서 2개의 제약이 걸리게 된다.
Moblility Criteria
역학 시스템을 분석하기 위한 가장 기본적인 단계는, 계의 자유도를 구하는 것이다.
2D 에서 구하는 방법은 다음과 같다.
3D 에서 구하는 방법은 다음과 같다.
Driving Constraint
시스템의 자유도가 0 인 경우 우리는 추가적인 제약식을 만들 필요가 없다. 하지만 자유도가 0이 아닌 정수인 경우. 우리는 추가적인 제약식이 있어야 연립방정식을 풀 수 있다. 이 때 주어지는 제약식을 Driving Constraint 라 한다.
예제
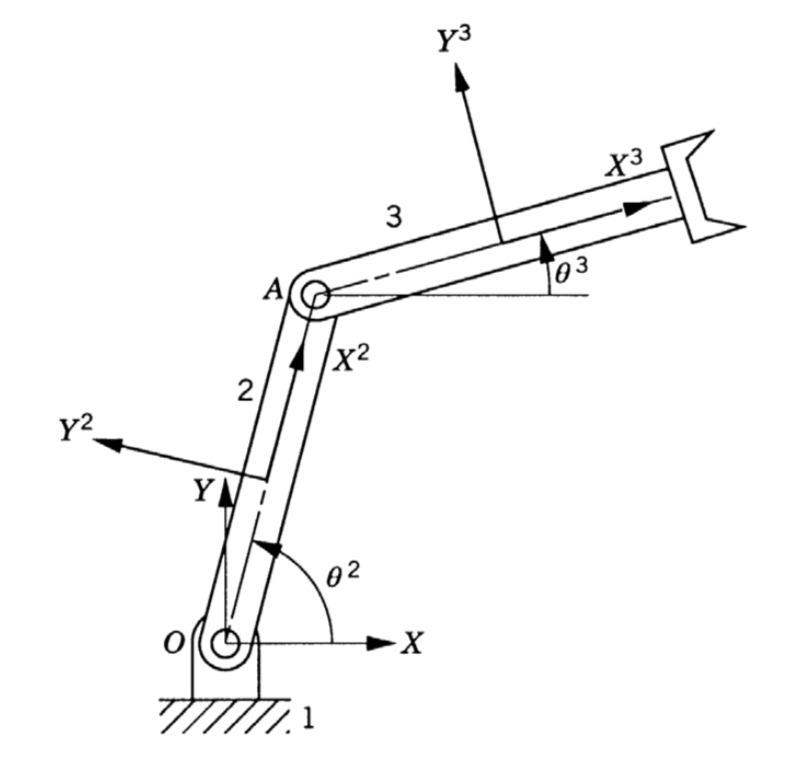
DOF 구하기
BODY
- Ground
- bar1
- bar2
3 x 3 = 9
Constraint
- Ground : 3
- Revoulte joint 1 : 2
- Revolute joint 2 : 2
3 + 2 + 2 = 7
Result
System DOF = 9 - 7 = 2
결과적으로 우리는 theta2, theta3 에 관해 자유롭다. 따라서 이 시스템의 기구학적 특성을 살펴보기 위해서는 이 두 요소에 대한 Driving Constraint 가 필요하다.
위 두가지 제약으로 부터,
O로 표현된 각은 초기 각이다.
제약식 나타내기
각 constraint condition 으로 부터 도출되는 식은, system body에서 결정되는 coordinate 변수의 종류 안에서 결정된다.
\\overset{\rightarrow}{q};=; \\begin{bmatrix} \[R_x^1& R_y^1 & \theta^1\] & \[R_x^2& R_y^2 & \theta^2\] & \[R_x^3 & R_y^3 & \theta^3\] \\end{bmatrix}^T \\ ;\\ ;=; \\begin{bmatrix} q_1& q_2& q_3& q_4& q_5& q_6& q_7& q_8& q_9 \\end{bmatrix}^T총 9개의 식이 나오고, 이 각각을 C_1, C_2.. 스칼라 함수라고 한다면, 총 9개의 스칼라 함수를 가지는 벡터함수 C는,
위와 같다. 그런데 각각의 스칼라 함수 안에 들어가는 함수는, 삼각함수로 표현되기 일쑤기 때문에 Non-linear 하다. 따라서 우리는 저 행렬식을 푸는데 있어 다른 방법을 생각해야 한다.
To solve nonlinear function
- Bisection method
- Golden Section method
- Newton-Raphson method
- secant method
우리는 여기서 Newton-Rahpson Method를 사용해 보겠다.