Classification of Dynamics
- 동역학
- 정역학 (Statics) 평형 (Equilibirium) 조건으로부터 반력을 구함 (Material Mechanics)
- 동역학(Dynamics)
- 운동학 (kinematics)
- 운동방정식 없이 가속도와 속도, 초기 위치등으로 현상을 기술하는 것을 말한다.
- 힘이 주어지지 않았을 때, 물체의 기하적인 특징을 분석한다.
- 질량에 관계 없다.
- 운동 방정식을 사용하지 않고 기술한다.
- 운동 역학 (kinetics)
- 운동 방정식을 통한 해석 방법을 말한다.
- 질량에 관계 있다.
- 운동학 (kinematics)
Forward, Inverse Dynamics
우리는 보통, 주어진 힘에 대한 운동을 해석하는 방법으로 동역학을 이용해 왔다. 기존의 익숙한 방법을 Forward Dynamics 라 한다. 그런데, 로보틱스 같은 분야에서는 내가 원하는 궤적 (Path)를 따라가도록 하기 위해서 가해야 하는 힘이 얼마인지를 찾는 경우가 있다. 이런 경우 사용되는 동역학의 방법을 Inverse Dynamics 라 한다.
Straight, Curve
운동은 직선 운동과 곡선운동으로 나눌 수 있다. 단 방향으로의 운동만 발생한다면 스칼라 로 표현가능하지만, 그렇지 않을 경우 우리는 해당 위치의 특성값을 벡터 로 표현해야 한다.
Translation, Rotation
일반적인 운동은 병진운동과 회전운동, 두 가지의 형태의 결합으로 발생한다. 병진운동이라 함은, 물체의 자세가 바뀌지 않는 운동을 말한다. 위에서 배운 직선운동과 곡선 운동이 이 병진운동의 카테고리 안에 들어간다. 회전운동은 물체의 자세를 변화시키는 운동을 의미한다. 우리가 실제 물체의 운동을 관찰할 경우 이 두가지의 운동의 형태의 결합으로 모든 운동을 기술할 수 있다. (강체)
- 병진 운동
- 직선 운동
- 곡선 운동
- 회전 운동
Degree of Freedom (DOF)
자유도(DOF)란 어떠한 물체가 움직이는 형상 (configuration)을 표현하는데 필요한 최소한의 좌표 수를 의미한다.
자유도는 시간에 대해 독립적으로 계산한다. 그런데 만약에 특정 시간에 대해 시스템의 위치와 모양이 결정된다면 이 때 DOF는 0이다. 왜냐하면 시간에 대해 독립적이라 했으므로 DOF가 0이 아니라면, 어떤 시간을 잡던지 시스템의 위치와 모양은 결정될 수 없다. 그런데 특정시간에 결정된다면 DOF는 0이다.
다루는 시스템의 크기가 커져, Body의 갯수가 많아지면, 각각의 body에 대한 좌표(Coordinates) 갯수는 많아지지만 이에 비례하여 DOF가 증가하지는 않는다. 그 이유는 Body들이 서로 연관되어 있기 때문인데, 자세한 것은 다음에 설명하도록 하고, 지금은 간단한 그림을 통해 직관적으로 이해하는 것을 우선으로 하자.
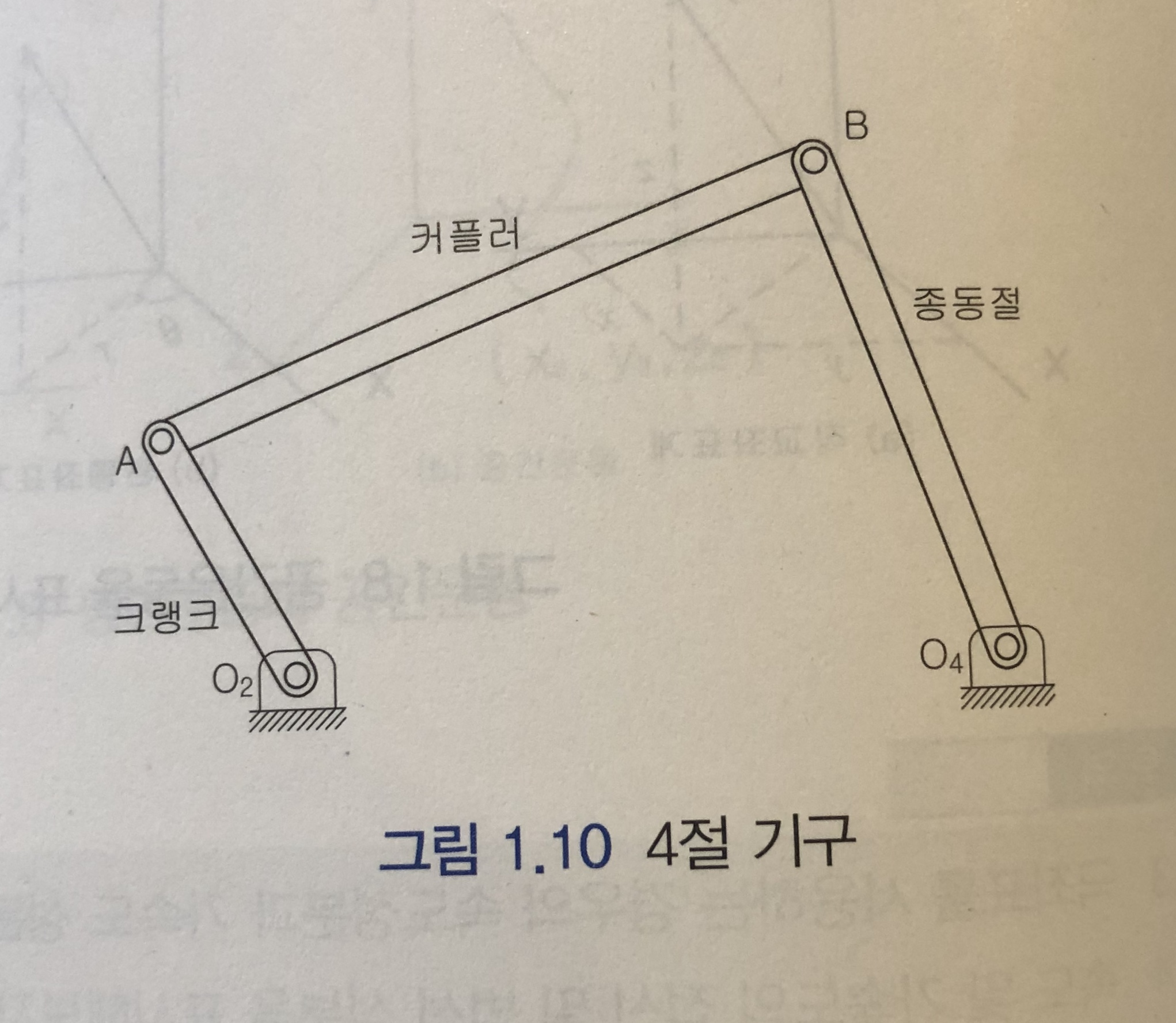 Example system
Example system
이런 시스템이 주어졌을 때, 크랭크의 각위치만 알면, 다른 링크의 형상도 계산할 수 있으므로, 자유도는 1이다. 즉, 특정 형상을 결정하기 위해 필요한 좌표의 갯수가 자유도 이다.
Point mass, particle
질량은 있으나 크기를 무시할 만큼 작은 물체를 질점이라고 한다. 크기가 점만큼 작기 때문에 회전운동을 고민할 필요가 없다.
Rigid Body
강체(rigid body)는 여러개의 질점들이 모여져 있고, 질점들 사이의 거리가 변하지 않는 물체이다. 이에 비해 탄성체는 변형에 의해 질점 사이의 거리가 변하는 물체이다. 우리는 보통 강체로 모든 물체를 가정하고 문제를 푼다. (Rigid body Assumption)